Կիսաավտոմատ Panel Bender EMBC 1402
արտադրանքի ճշգրտում
| Ոչ | Անուն | Պարամետր | Միավոր |
| 1 | Առավելագույն երկարությունը | 1400 թ | mm |
| 2 | Առավելագույն լայնությունը | 1400 թ | mm |
| 3 | Min.Ճկման երկարությունը | 200 թ | mm |
| 4 | Min. ճկման լայնությունը | 260 թ | mm |
| 5 | Առավելագույն ճկման հաստությունը (MS,UTS410N/մմ²) | 1 | mm |
| 6 | Նվազագույն ճկման հաստությունը (MS,UTS410N/մմ²) | 0.5 | mm |
| 7 | Առավելագույն ճկման բարձրություն | 170 | mm |
| 8 | Վերին սեղմակի երկարության ճշգրտման ռեժիմի ձեռնարկ | ||
| 9 | Միջին էներգիայի սպառումը | 2.2 | KW |
| 10 | Քաշը | 15 | T |
Բնութագրերը և հիմնական կառուցվածքը
Մեքենայի նախագծման և արտադրության առումով Hebei Hanzhi CNC Machinery Co., Ltd.հիմնականում կենտրոնանում է հետևյալ կետերի վրա.
1. Մարքեթինգային հայեցակարգ, որը հետապնդում է գործնականությունը և խնայում է օգտագործողին յուրաքանչյուր կոպեկ:
2. Շատ հուսալի և ճշգրիտ դիզայնի հայեցակարգ:
3. Բարձրորակ հումք, գնված մասեր և վերամշակման նուրբ տեխնիկա:
4. Ավելի շատ շեշտադրում հեշտ օգտագործման և պահպանման և անվտանգության վրա:
5. Սպասարկման ցածր տոկոսադրույքը և պահպանման ծախսերը նույն ոլորտում:
շրջանակ
Ա. Եռաչափ վերջավոր տարրերի մոդելի կառուցում. մշակված և մշակված 3D պինդ մոդելի հիման վրա հաշվարկների համար կառուցվում է դինամիկ վերջավոր տարրերի մոդել:Մոդելը հաշվի է առնում ուժի փոխանցման միացման հիմնական բաղադրիչները:Միացման միջոցով ուժերը փոխանցվում են առանցքակալին, ապա կատարվում է առանցքակալի ամրության վերլուծություն։
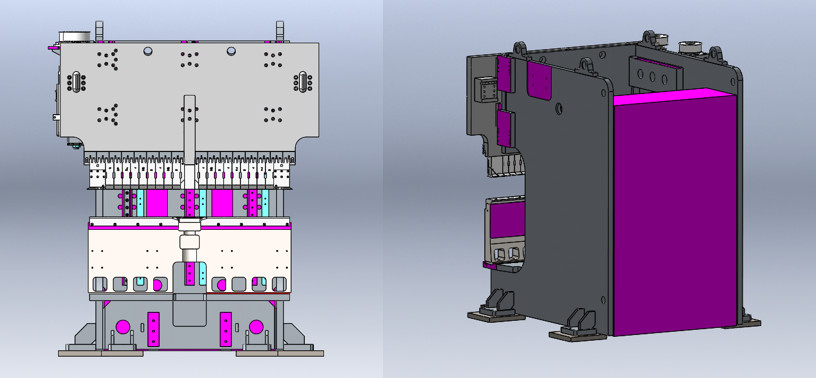
Նկ. 1 Վահանակի թեքում Ամբողջական մեքենայի վերջավոր տարրերի դինամիկ մոդելավորում
Բ. Ստատիկ վերլուծության արդյունքների վերլուծություն. մշակման դանդաղ արագության շնորհիվ ամրության վերլուծությունը կարող է վերածվել ստատիկ խնդրի:Ելնելով ափսեի սեղմման բեռից և կտրիչի գլխի ուղղահայաց ուղղությամբ ճկման բեռից՝ ստորև ներկայացված են լարվածության և դեֆորմացիայի արդյունքները:Առավելագույն լարվածությունը հայտնվում է մարմնի կոկորդում, առավելագույն լարումով 21,2 մպա, իսկ առավելագույն դեֆորմացիան հայտնվում է մարմնի վերին ծայրում՝ 0,30 մմ առավելագույն դեֆորմացիայով:
Շրջանակի վերջավոր տարրերի վերլուծության արդյունքների համաձայն՝ որպես նյութ ընտրվել է Q345 պողպատը;ընդունվել է ածխածնի երկօքսիդի վահանի զոդում.Կատարվել է կոփման բուժում՝ եռակցման արդյունքում առաջացած սթրեսները վերացնելու համար.այդպիսով ապահովելով սարքավորումների ճշգրտությունը, կայունությունը և բարձր կոշտությունը երկարաժամկետ շահագործման համար:
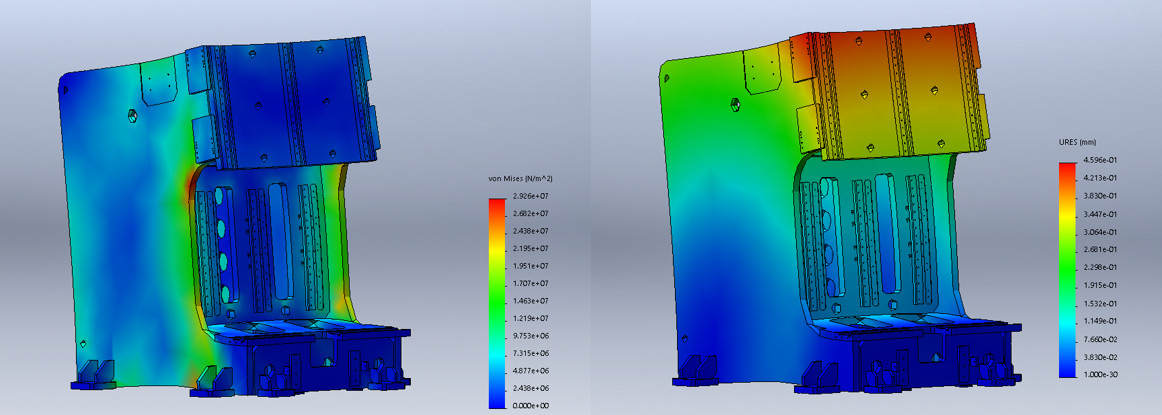
Նկ. 2 Շրջանակի լարվածության տեղաշարժի դեֆորմացիայի վերլուծության արդյունքները
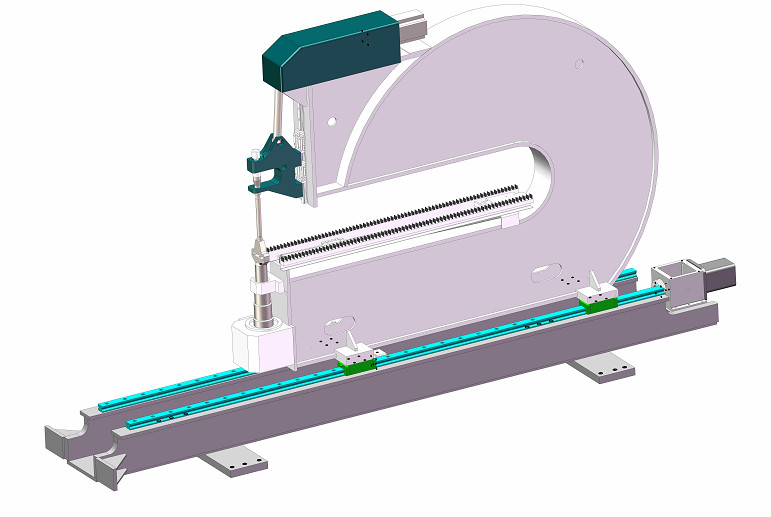
Վերին խոյ
Այս մասը հիմնականում բաղկացած է սահողից, բարձր ոլորող պտտվող կապարի պտուտակից, ռեդուկտորից, ուղեցույցից, սերվո շարժիչից և այլն:Հիմնական շարժիչը կառավարվում է servo շարժիչով, իսկ կառավարման ռեժիմը servo համաժամանակյա հսկողություն է, որը կարող է արդյունավետորեն ապահովել դիրքավորման ճշգրտությունը, արագ արագությունը և բարձր կառավարելիությունը:Կապարի պտուտակի և ուղեցույցի ռելսի քսումը ընդունում է ավտոմատ քսում, իսկ քսուքը 00# է, որն ապահովում է կապարի պտուտակի և ուղեցույցի երկարատև շահագործման ժամկետը և ճշգրտությունը:
Վերին սահիկի ստատիկ վերլուծության արդյունքները. վերին աղյուսակի երիկամների լարվածության տեղաշարժի դիագրամը ցույց է տալիս, որ առավելագույն լարվածությունը հայտնվում է վերին մասում, առավելագույն լարվածությունը 152 մպա է, առավելագույն դեֆորմացիան հայտնվում է վերին սեղանի վերին ծայրում, առավելագույն դեֆորմացիան: 0,15 մմ է
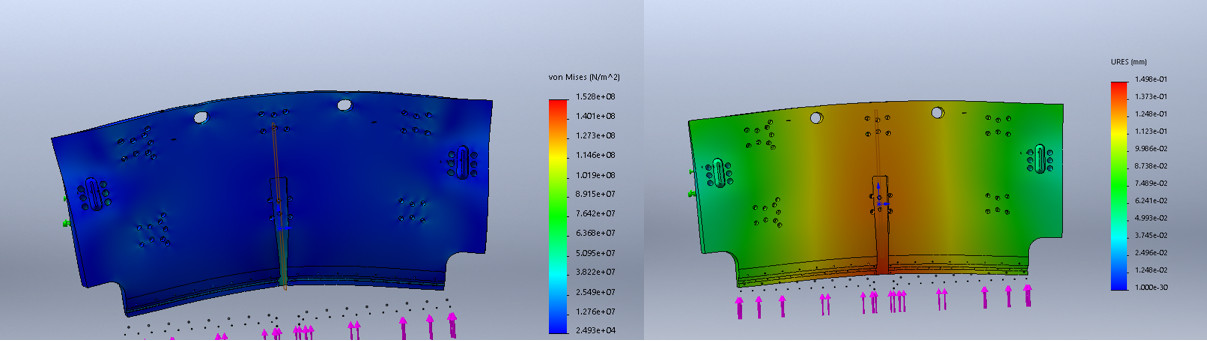
Նկ. 3 խոյի լարվածության տեղաշարժի վերլուծության արդյունքները
Համաձայն խոյի վերջավոր տարրերի վերլուծության արդյունքների՝ որպես նյութ ընտրվել է Q345 պողպատը.Օգտագործվել է CO2 պաշտպանված զոդում;Կատարվել է կոփման բուժում՝ եռակցման հետևանքով առաջացած սթրեսը վերացնելու համար.այդպիսով ապահովելով սարքավորումների ճշգրտությունը, կայունությունը և բարձր կոշտությունը երկարաժամկետ շահագործման համար:
Կռում միավոր
Կռացող միավորի ուժային շարժիչ մասը շարժվում է սերվոշարժիչով առանց հիդրավլիկ համակարգի ներգրավման, որն ունի մեծ առավելություններ բաղադրիչների մաշվածության և փոխանցման արդյունավետության նվազեցման առումով՝ համաձայն էներգախնայողության և շրջակա միջավայրի պաշտպանության քաղաքականության, պետության կողմից։
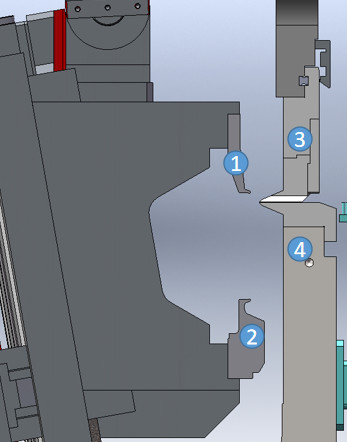
Համաձայն թերթիկի տեղեկատվության պարամետրի, համակարգը ավտոմատ կերպով հաշվարկում է վերին մամլիչ դանակի դիրքը 3 և վերահսկում է վերին մամլիչ դանակի 3-ի և ստորին մամլիչ դանակի 4-ի միջև հեռավորությունը թերթիկը ամրացնելու համար.Համակարգի պարամետրերի համաձայն, անկախ նրանից՝ այս ճկումը վերև կամ վար է, ստորին սեղմիչ դանակը 2 կամ վերին մամլիչ դանակը 1 կառավարվում է, որպեսզի արագ շարժվի դեպի ճկման դիրքը.ըստ սահմանման տարբեր անկյունների՝ ճկման դանակը կառավարվում է, որպեսզի տեղափոխվի հաշվարկված դիրք՝ արտոնագրված անկյունի հաշվարկման բանաձևի միջոցով՝ ճկումն ավարտելու համար:
Ըստ ճկման տարբեր ձևերի՝ կարելի է բաժանել անկյունային ճկման, խոշոր աղեղի ճկման, հարթեցման ճկման և այլն, որոնց անկյունային կռումը բաժանվում է վերև ճկման և ներքև ճկման:
Վերին սեղմման միավոր
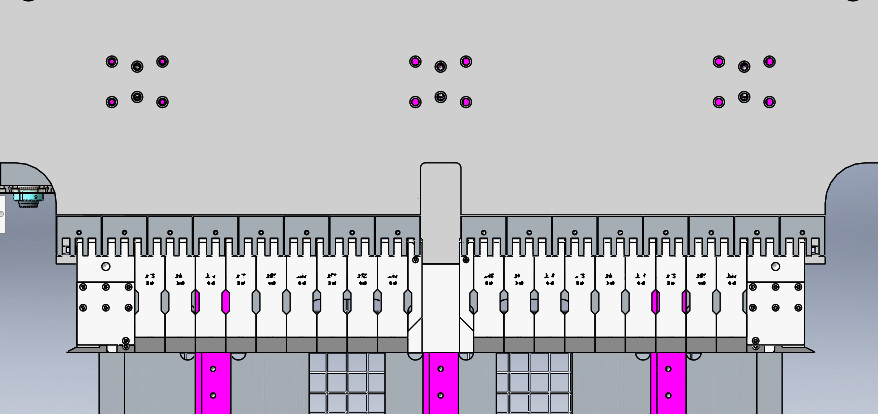
Նկ.6 Վերին մամլիչ սարք
Վերին մամլիչ միավոր. բոլոր ճկման պրոցեսների մի մասը, EmbC լրիվ սերվո բազմակողմ ճկման կենտրոնը հագեցած է հատուկ վերին սեղմիչով, որը կարող է տեղադրվել և ձեռքով կարգավորվել տարբեր ափսեների երկարությունների համար:
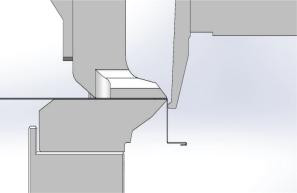
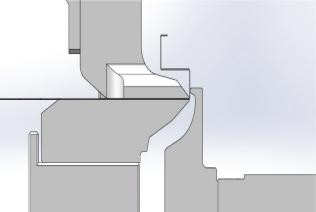
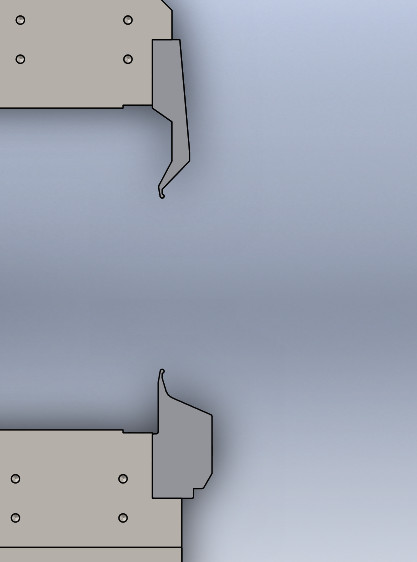
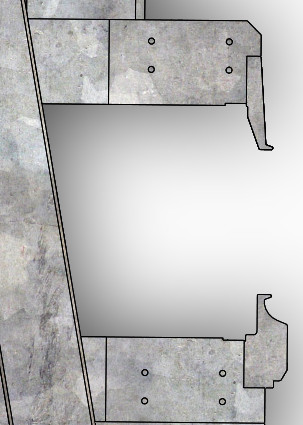
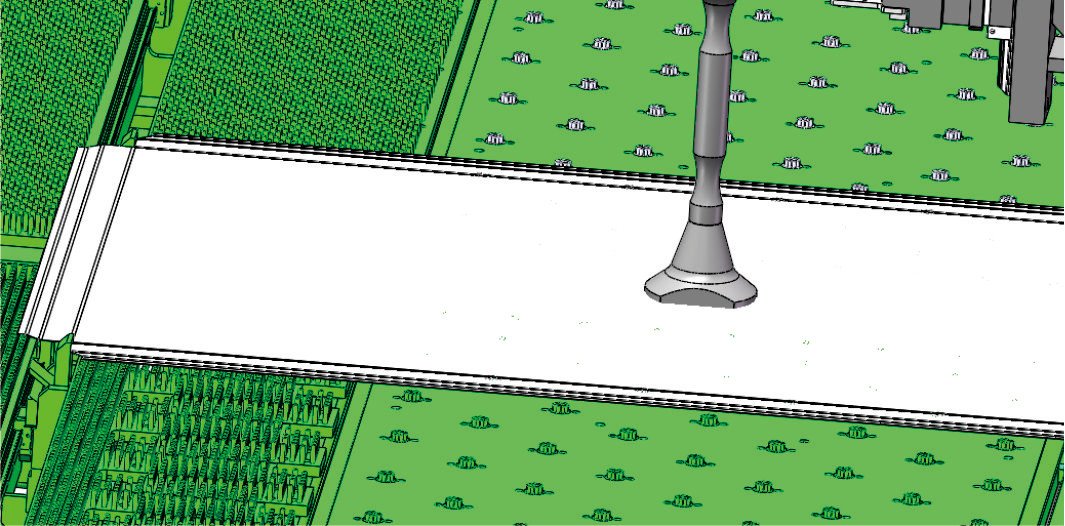
Խուսափող ճկվող տուփի պահանջները բավարարելու համար մենք մշակել ենք հատուկ խուսափման մածուկ:Սեղմելուց առաջ խուսափման ձողի մի մասը գտնվում է վիճակում, նախքան գծապատկերում սեղմելը, և սնուցումը սկսվում է:Սնուցվելուց հետո այն գտնվում է վիճակի մեջ՝ սեղմելով գծապատկերում և սկսվում է ծռվելը։Կռանալուց հետո վերին սահիկը շարժվում է։Վերին սահիկի շարժման ժամանակ A մասը սեղմելուց առաջ ավտոմատ կերպով կտեղափոխվի վիճակ:Այն բանից հետո, երբ վերին սահիկը տեղափոխվում է սահմանված դիրք, սկսվում է հաջորդ շարժումը:
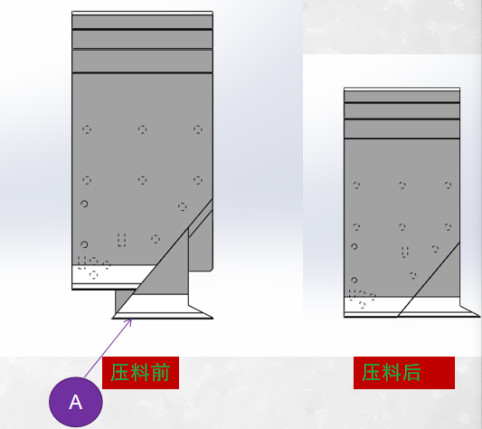
Նկ.7 Ճկման տուփի խուսափում
Գործիք
Կռացող գործիքները բաժանվում են վերին ճկման գործիքների և ստորին ճկման գործիքների:Հատուկ ճկման գործիքները կարող են հարմարեցվել ըստ հաճախորդի տարբեր պահանջների:
2.Plate կերակրման միավոր:
Մետաղական թիթեղների շարժումը, սեղմումը և պտույտը վերահսկվում են համապատասխանաբար ռոբոտ 1-ի, սարքի 2-ի և պտտվող սկավառակի 3-ի կողմից:Մեքենաների մշակման ողջ գործընթացում մետաղի սնուցումը վերահսկվում է սերվո շարժիչներով, ինչը հնարավորություն է տալիս ավտոմատացնել և արագ տեղակայել, նվազեցնելով շարժման ժամանակը և բարձրացնելով արդյունավետությունը:Կառուցվածքային նորամուծությունների և լիակատար սերվո հսկողության կիրառման շնորհիվ մետաղի թիթեղների սեղմումն ու պտույտը կարողանում է պահպանել ճշգրտությունը բազմակողմ ճկման կենտրոնի աշխատանքային գործընթացի ընթացքում:Բազմաթիվ բարդ աշխատանքային մասերի համար, նույնիսկ բազմանկյուն, կարող է երաշխավորվել 0,001 շարունակական պտույտի ճշգրտություն:
3. Ափսեի դիրքավորման միավոր:
Թիթեղի դիրքավորման միավորը բաղկացած է ձախ դիրքավորող պտուկից, աջ դիրքավորող պտուկից, առջևի դիրքավորող պտուկից և հետևի դիրքավորող պտուկից;Ձախ և աջ դիրքավորող կապիչները ափսեը դնում են ձախ և աջ:Առջևի դիրքավորող քորոցը և հետևի դիրքավորող քորոցը վերահսկում են ափսեի առջևի և հետևի դիրքերը և ապահովում են, որ ափսեը զուգահեռ է վերին և ստորին մամլիչ դանակներին, որն օգտագործվում է ափսեի դիրքավորման ճշգրտությունն ապահովելու համար:
Թիթեղի դիրքավորման միավորը կարող է ավտոմատ կերպով տեղադրել թիթեղը և ինքնաբերաբար ավարտել բազմակողմ ճկումը միանգամից, ինչը մեծապես կրճատում է ճկման ցիկլի ժամանակը, վերահսկում է ափսեի կտրման սխալը առաջին ճկման ժամանակ և ապահովում ճկման ճշգրտությունը:
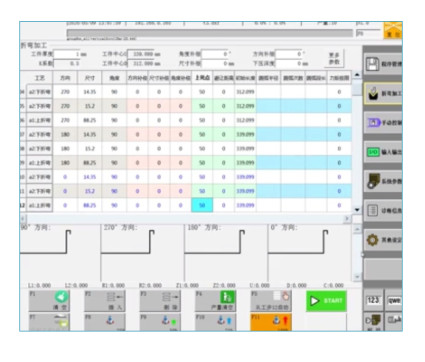
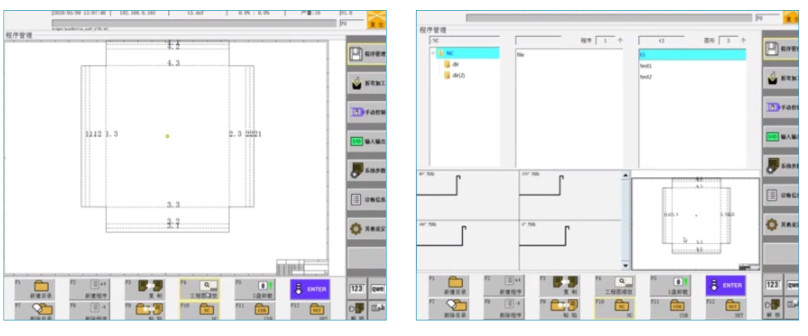
4.CNC համակարգ
A: Համատեղ մշակված CNC համակարգերը և ծրագրակազմը կարող են կիրառվել և կառավարվել արագ և հեշտությամբ
B: Հիմնական հատկանիշները.
ա) .EtherCAT ավտոբուսի կառավարման մեթոդ բարձր միջամտության դիմադրությամբ
բ) Աջակցում է ուղղակի ծրագրավորմանը, յուրաքանչյուր քայլի համար ճկման տվյալները կարող են մուտքագրվել ձևի մեջ
գ) աջակցություն կոր ճկման համար
դ) Լիովին էլեկտրական սերվո հսկողություն
ե) Աջակցություն ճկման փոխհատուցմանը
զ) Աջակցություն երկչափ ծրագրավորմանը
2D ծրագրավորման գործառույթ, ներմուծում է 2D DXF գծագրման տվյալներ, ավտոմատ կերպով առաջացնում է ճկման գործընթացը, ճկման չափը, ճկման անկյունը, ռոտացիայի անկյունը և այլ տվյալներ:Հաստատումից հետո կարող է իրականացվել ճկման ավտոմատ մշակում
Հիմնական մասի ցանկ
| Ոչ | Անուն | Ապրանքանիշը |
| 1 | Շրջանակ | Իմաստություն |
| 2 | Գործիք | Իմաստություն |
| 3 | Կռում միավոր | Իմաստություն |
| 4 | CNC համակարգ | Իմաստություն |
| 5 | Սերվո շարժիչ | Իմաստություն |
| 6 | Սերվոյի վարորդ | Իմաստություն |
| 7 | Երկաթուղային | Իմաստություն |
| 8 | Գնդիկավոր պտուտակ | Իմաստություն |
| 9 | Կրճատող | Թայվան |
| 10 | Անջատիչ | Շնայդեր |
| 11 | Կոճակ | Շնայդեր |
| 12 | Էլեկտրական մաս | Շնայդեր |
| 13 | Մալուխ | Յիչու |
| 14 | Հարևանության անջատիչ | Օմրոն |
| 15 | կրող | SKF/NSK/NAICH |
4) Հաստոցների նախագծումը, արտադրությունը, ստուգումը և տեղադրումը համապատասխանում են հետևյալ չափանիշներին.
1, GB17120-1997
2, Q/321088JWB19-2012
3, GB14349-2011
Պահեստամասերի և գործիքների ցանկ
| Ոչ | Անուն | Քվ. | Դիտողություն |
| 1 | Գործիքների տուփ | 1 | |
| 2 | Տեղադրեք պահոց | 8 | |
| 3 | Inner վեցանկյուն բանալին | 1 հավաքածու | |
| 4 | Ձեռքով լիցքավորման ատրճանակ | 1 | |
| 5 | CNC համակարգի ձեռնարկ | 1 | |
| 6 | բաց բանալին | 1 |





